
Monica Li
My research focuses on the physical contact interface between robot and world, to develop robots capable of real-world dexterous manipulation. I am an experimentalist that uses analytical models to deepen our understanding of the physical world and guide mechanical design. My current interests include understanding soft contact dynamics and fluid-structure interaction in the context of robot grasping, as well as exploring tactile sensor design and sound as a sensing modality for robot perception.I am an incoming assistant professor at the University of Washington (starting Fall 2026) and am currently a research scientist at Berkshire Grey. I received my Ph.D. from UC Berkeley and my B.S. from Caltech, both in mechanical engineering.
Select Publications
Electronics-free tactile sensor design based in sound
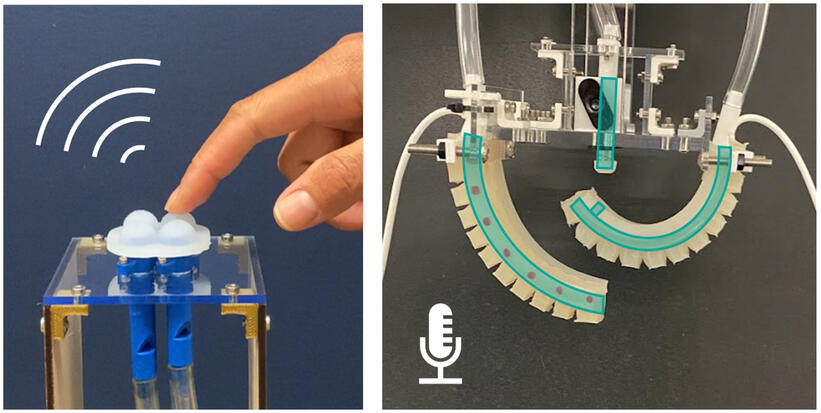
We rely heavily on sense of touch in our everyday lives. In robots, tactile sensing enables adaptive control strategies. Robustly integrating conventional tactile sensors is difficult, as wires and sensors may break from fatigue loading or unintentional collisions with the world. Equipping soft actuators with sensing is even more challenging as they undergo large material deformations. We designed a tactile sensor with no electronics near the end-effector. Resonant sound encodes contact and force and is monitored by a remotely located microphone. We demonstrate this sensor design on a soft gripper and soft skin.
Li, M., Stuart, H. S. (2025). “AcousTac: Tactile sensing with acoustic resonance for electronics-free soft skin." Soft Robotics, doi: 10.1089/soro.2023.0082
Li, M., Huh, T. M., Yahnker, C. R., Stuart, H. S. (2022). “Resonant pneumatic tactile sensing for soft grippers." Robotics and Automation Letters, vol. 7, no.4, pp. 10105-10111, doi: 10.1109/LRA.2022.3191186
Grasping in wet or submerged conditions
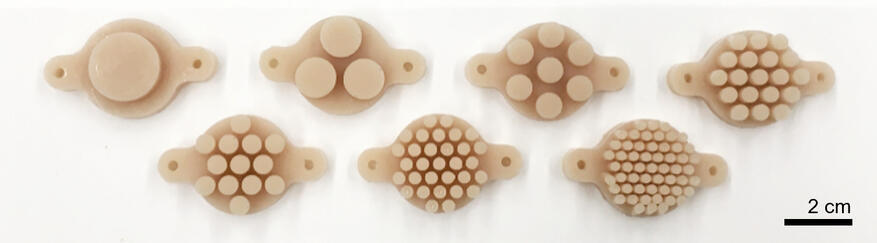
Robots impart forces through physical contacts, and designing for these adversarial contact conditions is critical. Intuitively, grasping something wet is more difficult than something clean and dry, as contact surfaces may become slippery due to fluid lubrication. Inspired by the pruning of human fingertips from prolonged exposure to water, we investigated how surface patterns on a robot's finger pads can increase friction. We found that in lubricated conditions, a few surface features exhibit higher friction force than a pad that is smooth or finely textured.
Li, M., Melville, D., Chung, E., Stuart, H. S. (2020). “Milliscale Features Increase Friction of Soft Skin in Lubricated Contact." Robotics and Automation Letters, vol. 5, no. 3, pp. 4781-4787, doi: 10.1109/LRA.2020.3003880
Real world robotic testing
Inspiration for my research comes from personal experiences working with robots. I have designed end-effectors for a marine robot and tested these in the field.
Li, M., Zande, R., Hernandez, A., Bongaerts, P., Stuart, H. S. (2019). “Gripper Design with Rotation-Constrained Teeth for Mobile Manipulation of Hard, Plating Corals with Human-Portable ROVs.” OCEANS 2019 MTS/IEEE Marseille.

For full publication list, my CV is here.
Running
Running is my favorite outdoor activity and a great way for me to process my thoughts. I have completed races at the marathon and ultramarathon distances.
